
I found a new toy : GnuRadio. it is a set of building-blocks for (Digital) Signal Processing.
It is created because of the interest in what is called software defined radio. Basically more and more
of the work of transmitting or receiving a (say) FM radio station is done in a PC, which leaves a very
minimal electrical circuit.
GnuRadio is a collection of such digital processing tricks. you can point-and-click them together
just like LEGO.
GnuRadio also has the capability to use the speakers and microphone of your PC.
So, using that you can build a sonar easy.
the simplest one is a doppler sonar, which detects movement.
the PC emits a constant tone. as it hits a stationary target you hear an unchanged echo.
But when returning from a moving target, the echo has become a higher (when approaching) or lower (when receding) tone.
with a filter the original tone is filtered away and you see the tone(difference) created by the movement of a target.
here you see me waving frantically, then holding still and finally moving slowly
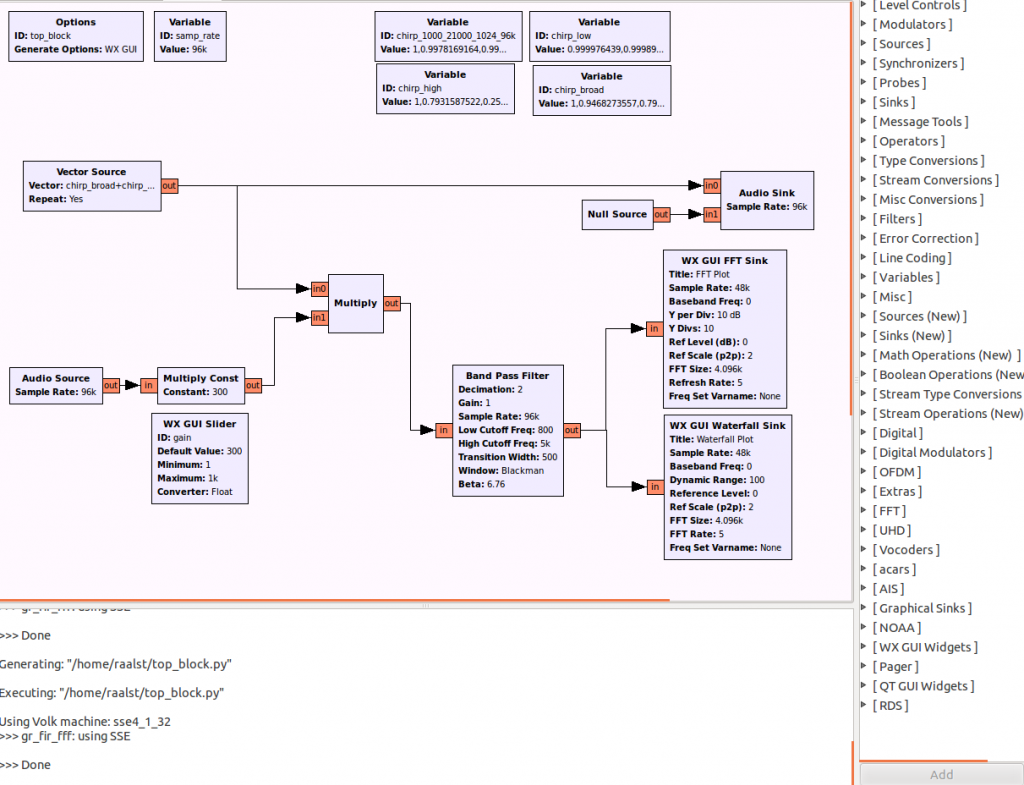
the building blocks used for this are ]http://i625.photobucket.com/albums/tt336/raalst/Screenshotfrom2013-03-10170640.png[/img]
It contains a signal source that is a 10kHz cosine wave, which is just a 10khz tone. It is being put on the speakers (the audio Sink).
then from the Audio source (the mic) the signal is amplified and multiplied with the original 10Khz signal. then the bandpass filter lets
stuff thru from 5 Hz up til 300 Hz. these frequencies are related to the speed of the target, and waving your hand is not
very fast. so that is why the frequencies of interest are low.
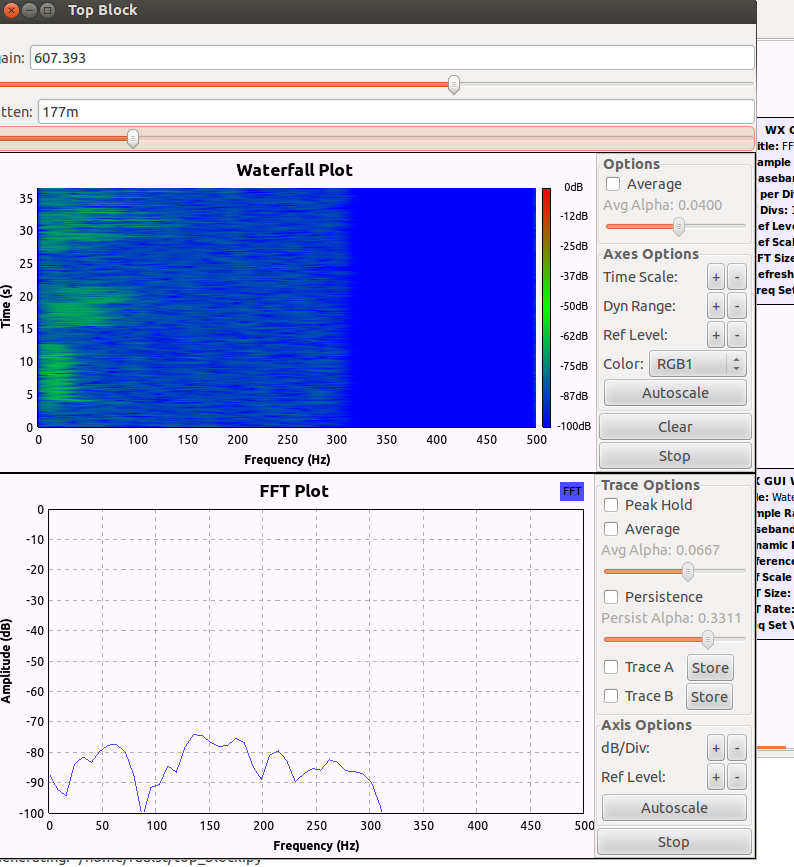
another type of sonar is the Frequency Modulated Continous Wave (FMCW)
this one does determine the range of the target. the V pattern is my hand moving to and fro at about half a meter's
distance to the microphone.

the use of building blocks looks quite the same, except that the emitted sound is no longer a constant tone, but a
chirp that first raises in frequency, then lowers again. since the echo will arrive later (because it had to travel to the target
and back) there is in the PC a difference in frequency between the emitted chirp and the received echo. this
difference in frequency is changing with the time delay of the echo, and hence with the distance of the target.
If you are in to sonar, this is a toy you must give some attention to !
It is created because of the interest in what is called software defined radio. Basically more and more
of the work of transmitting or receiving a (say) FM radio station is done in a PC, which leaves a very
minimal electrical circuit.
GnuRadio is a collection of such digital processing tricks. you can point-and-click them together
just like LEGO.
GnuRadio also has the capability to use the speakers and microphone of your PC.
So, using that you can build a sonar easy.
the simplest one is a doppler sonar, which detects movement.
the PC emits a constant tone. as it hits a stationary target you hear an unchanged echo.
But when returning from a moving target, the echo has become a higher (when approaching) or lower (when receding) tone.
with a filter the original tone is filtered away and you see the tone(difference) created by the movement of a target.
here you see me waving frantically, then holding still and finally moving slowly
the building blocks used for this are ]http://i625.photobucket.com/albums/tt336/raalst/Screenshotfrom2013-03-10170640.png[/img]
It contains a signal source that is a 10kHz cosine wave, which is just a 10khz tone. It is being put on the speakers (the audio Sink).
then from the Audio source (the mic) the signal is amplified and multiplied with the original 10Khz signal. then the bandpass filter lets
stuff thru from 5 Hz up til 300 Hz. these frequencies are related to the speed of the target, and waving your hand is not
very fast. so that is why the frequencies of interest are low.
another type of sonar is the Frequency Modulated Continous Wave (FMCW)
this one does determine the range of the target. the V pattern is my hand moving to and fro at about half a meter's
distance to the microphone.
the use of building blocks looks quite the same, except that the emitted sound is no longer a constant tone, but a
chirp that first raises in frequency, then lowers again. since the echo will arrive later (because it had to travel to the target
and back) there is in the PC a difference in frequency between the emitted chirp and the received echo. this
difference in frequency is changing with the time delay of the echo, and hence with the distance of the target.
If you are in to sonar, this is a toy you must give some attention to !

Comment